
葛进教授课题组Science Bulletin:精准感知表面粘性的仿生触觉传感器
设想这样一个场景:让机器人拿起一个沾了糖浆的乒乓球,然后放入一个小盒子。对人类而言,这或许轻而易举;对机器人来说,却是一项充满挑战的任务。它可能无法稳稳放下,或将乒乓球放到盒子之外。造成这一困难的关键在于,现有触觉传感器尚不擅长感知面外拉力,难以根据表面粘性实时调整抓放动作。
近期,线上赌博app-赌博软件下载 葛进教授课题组与德国亥姆霍兹德累斯顿罗森多夫研究中心(HZDR) Denys Makarov课题组合作,从人类皮肤感知黏附力过程中,找到这一难题的仿生解决方案。人类皮肤在感知黏附力时会产生独特的双向形变:受压时内陷,受拉时外鼓。研究团队借鉴这一机制,设计出一种可双向形变、且内部嵌入磁源的柔软传感器表面。当传感器表面被按压或拉起时,内置磁场传感器处的磁场会发生方向截然不同的特征变化,仿佛一根原本笔直的基线,清晰地分裂为两个相反的分支。得益于此,即便只用一个磁场传感单元,也能本征地分辨压力与拉力,从而在同一接触位点上实现对两种力学参量的实时解耦检测。
该传感器结构非常稳定,在稳定性测试中,连续工作10小时,信号漂移不到0.25%;经上万次按压-拉伸循环,信号重合度仍高达99.52%。其检测范围为:压力0-150 kPa,拉力0-33 kPa,可覆盖多数日常粘性感知场景。集成至机器人手并配合简易神经网络后,该传感器对不同表面的粘性识别准确率达99.78%。相比之下,人类受试者在相同任务下的平均识别精度为85.71%。这意味着,在判断表面粘性这一任务上,该传感系统已展现出超越人类的表现。
未来,借助该传感器,机器人不仅能够感知表面是否发黏,还可进一步判断黏性的强弱与类型,甚至在不同压力、接触时间或分离速度下,识别材料表面黏性随老化程度的变化。其潜在应用包括:检测表面粘性污染、评估材料老化状态、区分不同胶带的黏性等级,以及在未知物体表面识别中提供关键感知信息。最终,在厨房、工厂、实验室乃至太空等复杂场景下,机器人有望真正实现“当黏则黏,该放则放”的灵巧操作。
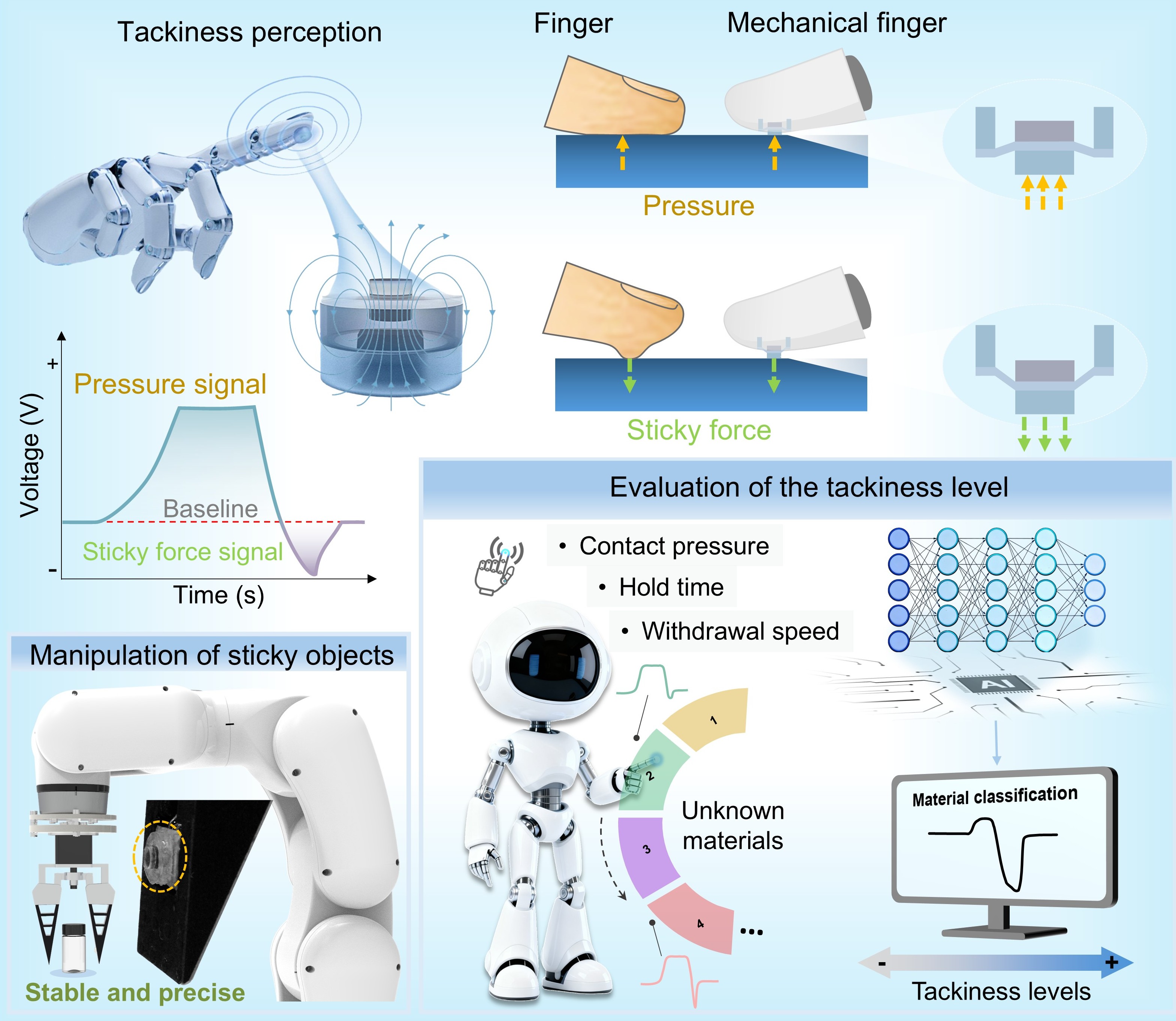
图1 用于粘性精准识别及粘性物体稳定操作的磁力耦合式触觉传感器
该工作得到了国家自然科学基金、广东省基础与应用基础研究基金、欧洲研究理事会(ERC)资助的3DmultiFerro项目及欧盟委员会资助的REGO项目的支持。相关研究结果于4月30日在Science Bulletin上在线发表,题为“Precise perception of surface tackiness enabled by a soft single-sensing-element tactile sensor”。该论文以中山大学为唯一通讯单位,线上赌博app 2022级直博生杨颖为第一作者,葛进教授为独立通讯作者。
文章链接://www.sciencedirect.com/science/article/pii/S2095927326004652